Ch07 Symmetric Matrices and Quadratic Forms
7.2 Quadratic Forms
A quadratic form on is a function defined on whose value at a vector in can be computed by an expression of the form , where is an symmetric matrix. The matrix is called the matrix of the quadratic form.
The simplest example of a nonzero quadratic form is . Examples 1 and 2 show the connection between any symmetric matrix and the quadratic form .
Example 1
Let . Compute for the following matrices:
a.
b.
Solution
omit
The presence of in the quadratic form in Example 1(b) is due to -2 entries off the diagonal in the matrix . In contrast, the quadratic form associated with the diagonal matrix in Example 1(a) has no cross-product term.
Example 2
For , let . Write this quadratic form as .
Solution
The coefficients of go on the diagonal of . To make symmetric, the coefficient of for must be split evenly between the -and -entries in . The coefficients of is 0. It is readily checked that
Change Variable in a Quadratic Form
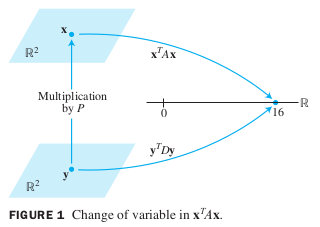
If represents a variable vector in , then a change of variable is an equation of the form
where is an invertible matrix and is a new variable vector in .
Here is the coordinate vector of relative to the basis of determined by the columns of . (See Section 4.4.)
If the change of variable (1) is made in a quadratic form , then
and the new matrix of the quadratic form is .
Since is symmetric, Theorem 2 guarantees that there is an orthogonal matrix such that is a diagonal matrix ,and the quadratic form in (2) becomes .
Example 4
Make a change of variable that transforms the quadratic form into a quadratic form with no cross-product term.
Solution of Example 4
The matrix of the given quadratic form is
The first step is to orthogonally diagonalize Its eigenvalues turn out to be and . Associated unit eigenvectors are
These vectors are automatically orthogonal (because they correspond to distinct eigenvalues) and so provide an orthonormal basis for . Let
Then and .
A suitable change of variable is
Then
To illustrate the meaning of the equality of quadraticforms in Example 4, we can compute for using the new quadratic form.
First, since ,
so
Hence
This is the value of when .
See the fiqure below.
Theorem 4
The Pricipal Axes Theorem
Let be an symmetric matrix. Then there is an orthogonal change of variable, that transforms the quadratic form into a quadratic form with no cross-product term.
The columns of in Theorem 4 are called the principal axes of the quadratic form .
The vector is the coordinate vector of relative to the orthonormal basis of given by these principle axes.
A Geometric View of Pricipal Axes
Suppose , where is an invertible symmetric matrix, and let be a constant.
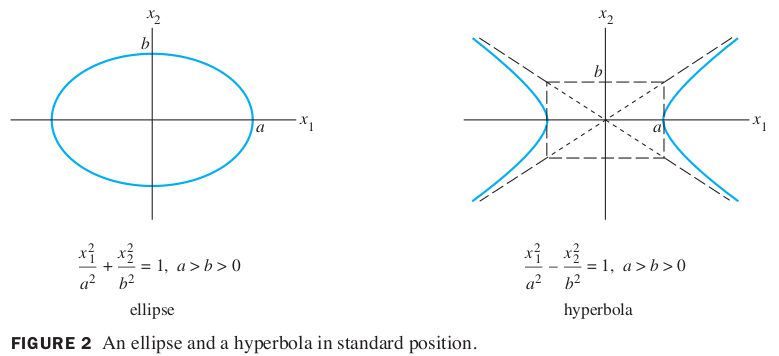
It can be shown that the set of all in that satisfy
either corresponds to an ellipse (or circle), a hyperbola, two intersecting lines, or a single point, or contains no points at all.
If is a diagonal matrix, the graph is in standard position, such as in the figure below.
If is not a diagonal matrix, the graph of equation (3) is rotated out of standard position, as in the figure below.
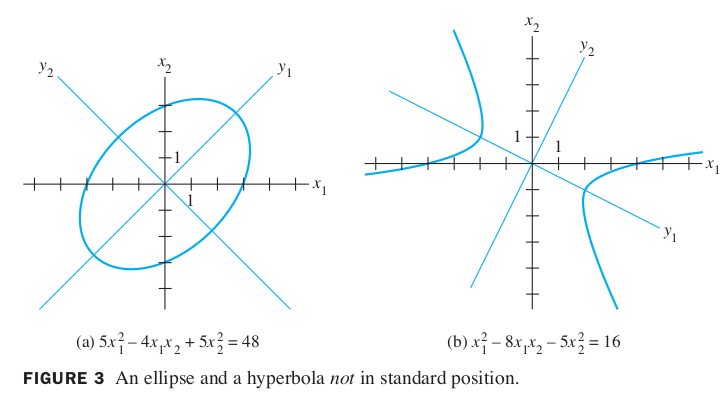
Finding the principal axes (determined by the eigenvectors of ) amounts to finding a new coordinate system with respect to which the graph is in standard position.
Classifying Quadratic Forms
A quadratic form Q is:
- positive definite if for all
- negative definite if for all
- indefinite if assumes both positive and negative values.
Also, is said to be positive semidefinite if for all , and negative semidefinite if for all .
Quadratic Forms and Eigenvalues
Theorem 5
Let be an symmetric matrix. Then a quadratic form is:
- positive definite if and only if the eigenvalues of are all positive,
- negative definite if and only if the eigenvalues of are all negative, or
- indefinite if and only if has both positive and negative eigenvalues.
Proof
By the Principal Axes Theorem, there exists an orthogonal change of variable such that
where are the eigenvalues of .
Since is invertible, there is a one-to-one correspondence between all nonzero and all nonzero .
Thus the values of for coincide with the values of the expression on the right side of (4), which is controlled by the signs of the eigenvalues , in three ways described in the theorem.