Chapter 1. Linear Equations in Linear Algebra
1.8 Introduction to Linear Transformations
Linear Transformations
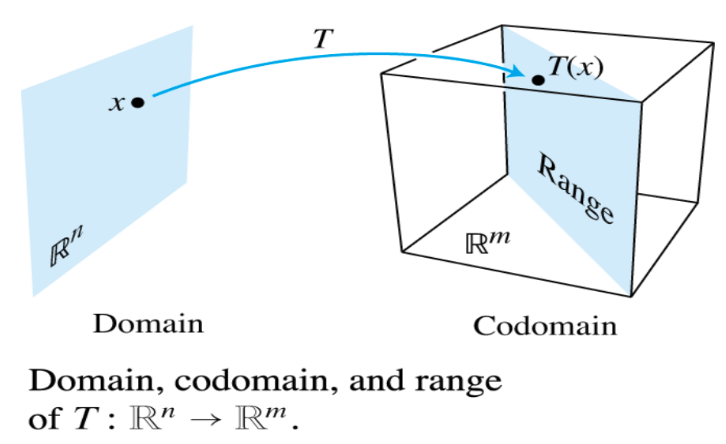
A transformation (or function or mapping) from to is a rule that assigns each vector in to a vector in .
- The set is called domain of , and is called codomain of .
- The notation indicates that the domain of is and the codomain is .
- For , the vector is called the image of (under the action of ).
- The set of all images is called the range of . See Fig. 2 below.
Matrix Transformations
- For each , is computed as , where is an matrix.
- For simplicity, we denote such a matrix transformation by .
- Observe that the domain of is when has columns and the codomain of is when each column of has entries.
- The range of is the set of all linear combinations of the columns of , because each image is of the form .
Example 1:
Let and define a transformation by , so that .
- Find , the image of under the transformation
- Find whose image under is .
- Is there more than one whose image under is ?
- Determine if is in the range of the transformation .
Solution of Example 1
1. Compute
2. Solve for . That is, solve , or
- Row reduce the augmented matrix:
- Hence .
- The image of this under is the given vector
3. Any whose image under is must satisfy equation (1).
- From (2), it is clear that equation (1) has a unique solution.
- So there is exactly one whose image is .
4. The vector is in the range of if is the image of some in , that is, if for some .
- This is another way of asking if the system is consistent.
- To find the answer, row reduce the augmented matrix:
- The third equation, , shows that the system is inconsistent.
- So is not in the range of .
Shear Transformation
Example 3: Let . The transformation defined by is called a shear transformation.
- It can be shown that if acts on each point in the square shown in Fig. 4 below, then the set of images forms the shaded parallelogram.
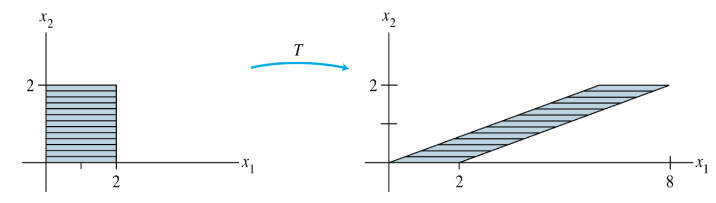
The key idea is to show that maps line segments onto line segments and then to check that the corners of the square map onto the vertices of the parallelogram.
For instance, the image of the point is , and the image of is .
deforms the square as if the top of the square were pushed to the right while the base is held fixed.
Definition : A transformation (or mapping) is linear if:
- for all in the domain of ;
- for all scalars and all in the domain of .
- Linear transformations preserve the operations of vector addition and scalar multiplication.
- Property (i) says that the result of first adding and in and then applying is the same as first applying to and and then adding and in .
These two properties lead to the following useful facts.
- If is a linear transformation, then and for all vectors in the domain of and all scalar .
- Property(3) follows form condition (2) in the definition, because .
- Property (4) requires both (1) and (2):
- If a transformation satisfies (4) for all and , , it must be linear.
- (Set for preservation of addition, and set for preservation of scalar multiplication.)
- Repeated application of (4) produces a useful generalization:
- In engineering and physics, (5) is referred to as a superposition principle.
- Think of as signals that go into a system and as the responses of that system to the signals.
- The system satisfies the superposition principle if whenever an input is expressed as a linear combination of such signals, the system’s response is the same linear combination of the responses to the individual signals.
Contraction and Dilation
- Given a scalar , define by .
- is called a contraction when and a dilation when .