Reinforcement Learning (강화학습)¶
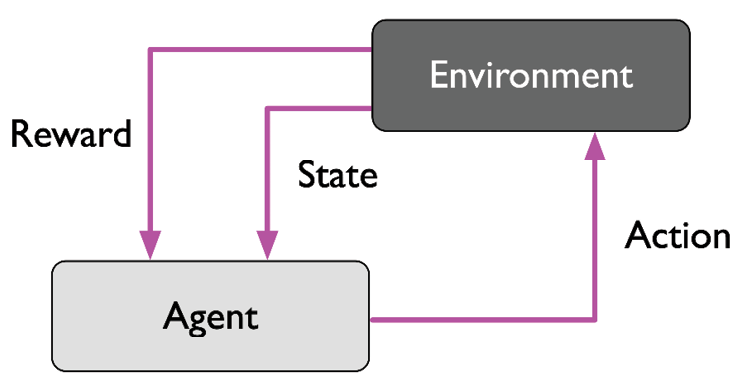
Agent (학습하는 시스템)가
- Environment를 관찰하고
- Action을 취한 후
- Reward를 받으면서
최상의 accumulated reward를 얻도록 action을 결정짓는 Policy을 학습하는 것 을 가리킴.
Policy
Agent는policy를 통해 어떤 enviroment(환경)에서 취할 연속적인 actions 를 결정함.- 결국 강화학습은 최상의 연속적인 actions를 얻어내는
policy를 얻는 것을 목표로 한다고 볼 수 있음.
Reinforcement Learning 에서는
- learning system을
agent라고 부르며, - 이 agent 가
environment와 상호 작용을 하면서 취한action에 따라 reward signal (or penalty signal)를 얻는데, - 여기서 최종적인 accumulated reward 를 maximize 하도록 어떤 일련의 action들을 수행할지를 결정하는
policy를 학습 한다.
A
policydetermines the action an agent should take in a particular situation to maximizefinal accumulated reward.
The three most important distinguishing properties of Reinforcement Learning Problem.¶
아래와 같은 특징을 가지는 문제를 agent가 효과적으로 해결하도록 해주는 algorithm들을 우리는 Reinforcement Learning method라고 한다.
Closed-loop Problem: agent가 취한 action(행동)이 이후의 agent의 input (environment의 state 등)에 영향을 준다.not providing explicitly direct instructionswhich actions to take : 명시적으로 어떤 action을 취해야 하는지를 직접적으로 알려주지 않거나 알려줄 수 없음 (supervised learning과의 가장 큰 차이점).- 연속된 action들과 이들로 인한
reward signal에 의한 결과는 장기간에 걸쳐 누적되어 나타난다. : 특정 action은 즉각적으로는 이득이 될 수 있으나 장기적으로는 오히려 손해가 될 수 있음.
Agent 와 Reinforcement Learning Process¶
Agent는 강화학습에서 학습자 에 해당 됨.
Reinforcement Learning Process는 다음의 요소들을 반드시 가지고 있어야 함.
Agent는 environment와 interaction(상호작용)을 함. (action + sensation)Action으로 Environment의 상태를 변화 시킴.Environment의 State일부를 sensing 할 수 있으며 이를 통해 다음action을 결정함.
Agent는 명시적인goal을 가짐.- 해당
goal은 Environment의 상태와 연관 되어 있음. - goal의 달성 여부에 관련된 reward가 정의 되며,
Agent의 현재 state에서 수행된action에 의해 변경된environment의 state와goal과의 연관성 에 의해 계산된Reward가 agent에 주어진다.
- 해당
Exploitation vs Exploration dilemma
일반적으로 agent가 효과적으로 reinforcement learning을 하려면,
exploration(탐험) 과exploitation(이용) 사이의 균형을 잘 잡아야 한다:
- \(^{(1)}\)exploration :
- 다양한 situation에 대해 적절한 action을 찾기 위해서 기존에 알고있는 최고의 action(=greedy action)이 아닌 새로운 시도를 하는 것을 의미함.
- exploration은 단기간 적은 보상을 획득하지만 현재 모르는 정보를 탐색해 현재 greedy action보다 더 나은 action을 발견하여 더 높은 total reward를 획득할 수 있는 수단임
- \(^{(2)}\)exploitation : 현재까지의 경험을 토대로 가장 높은 reward를 보이는 action을 수행하는 것을 의미함.
- 일종의 greedy algorithm임:
- exploitation은 현재 가진 정보를 기준으로 즉각적인 최고의 보상을 획득할 수 있는 수단
Supervised Learning과 Unsupervised Learning과의 차이점.¶
Reinforcement Learning은
- interaction으로부터 학습이 이루어져야 하는데,
- 이 경우 모든 situation에 대한 correct action을 지정하기가 불가능함
- 즉, whole label제공이 불가능하며 이 것이
supervised learning과의 차이점임.
때문에 reward function 등이 label 대신 주어짐.
Rewardsignal은 agent가 취한 action에 대한 environment의 (evaluative) feedback 으로 supervised learning의 ground truth에 해당하는 label (=instructive feedbak)과는 차이가 있음.- Reinforcement Learning의 경우,
어떤 이상적인 action을 명시적으로 모든 상황에 맞게 할당할 수 없기 때문 에 해당 action이 얼마나 goal을 달성하는데 유용한지를 측정하는 reward function (=evaluation feedback) 을 사용해 학습한다.
Supervised Learning에서는 정답(=best action, label)이 존재함 (이를 instructive feedback이라고 부름). 반면 Reinforcement Learning은 evaluation feedback으로 어느정도 좋은지 나쁜지를 정량화해주긴 하나, 현재 상황에 best action인지는 알 방법이 없음. 때문에 앞서 살핀 exploartion와 exploitation의 균형이 잡아야 함.
주어진 기간동안 해당 reward function으로부터 주어지는 reward signal의 합을 maximization하는 learning이라는 점에서 unsupervised learning하고도 차이 가 있다.
unsupervised learning은 아예 정답에 해당하는 정보가 없으나- Reinforcement learning의 경우 정답에 해당하는 정보를 주는
reward function이 존재한다.
Reinforcement Learning에서는
exploratory trial-and-error approach나deliberative planning등을 통해 agent는 final accumulated reward를 최대화하는 것을 목표로 한다.
Reinforcement Learning은
Unsupervised learning와 비슷하게,- agent가 얻는 experience의 내부적인 특성 구조 를 학습을 통해 추출하기도 하지만
- 이는 reinforcement learning의 최종 목표는 아님.
- experience의 내부적인 특성 구조 추출 과정을 통해 최종 목표인 reward signal을 maximization을 효과적으로 달성한다는 점에서 특성 구조 추출 자체가 목표인 representative learning 들과도 차이를 보임.
Reward function의 특징.¶
- Environment의 모든 state에 대해 reward와 penalty가 주어져있다고 생각하고 acton을 통해 agent는 environment의 state를 변경해 나갈 수 있다고 하자.
- 이때 agent가 acton을 결정하는 기준이 바로 policy이고 이 policy가 final accumulated reward를 최대화하는 방향으로 학습이 되게 하면 된다.
- 이는 매우 간단한 경우이고, 많은 경우 reward는 즉각적으로 주어지기 어려운 경우도 많다
(체스 등에서 당장은 상대편 말을 잡아서 이득이지만, 장기적으로는 킹을 잃게 되는 수가 있을 수 있고, 당장은 내 퀸을 잃지만 장기적으로는 상대 킹을 잡는 수가 있을 수 있다). - 더욱이 상대편이 있는 경우엔 상대방의 action에 의해서도 reward가 영향을 받게 된다는 점이 reward function 을 만들 때 어려운 점이다.
즉, reward는 action에 대해 즉각적일 수도 있으나 대부분 delayed feedback으로 주어질 수 있다.
결론¶
요약하면, Reinforcement Learning은 기존의 supervised learning이나 unsupervised learning과 구별되는 종류의 ML이다.
interaction이 일어나는 경우에서 사용되므로, 로보틱스등에서 많이 이용된다.
ML에서의 hyper-parameter tunning에서도 적용되는 경우도 많다.