Low Pass Filter¶
filter란 입력이미지에서
- 원하지 않는 값들은 걸러내고
- 원하는 값들을 추출하여
결과로 얻는 방법 또는 컴포넌트를 지칭.
대표적인 예로 edge 의 위치와 방향을 검출하여 Image Analysis 및 Image Segmentation의 기본이 되는 정보를 제공하거나, 영상을 blurring 또는 Sharpening하는 filter들이 있음.
이 문서에서는 spatial domain filter에서도 low pass filter를 다룬다.
Spatial domain filter and Frequency domain filter¶
Spatial domain filter- 결과 영상의 pixel값을 계산하는데, 입력 영상 해당 위치의 픽셀 하나만을 이용하기보다는 주변의 pixel들 을 값을 이용하는 Filter.
(mask혹은 kernel과의 convolution연산을 통해 수행됨)convolution은 다음 url참고 : Convolution
Frequency domain filter- Spatial domain의 입력 영상을 Fourier Transform(FT)등을 통해 freq. domain 으로 변환하여 처리가 이루어지는 filter.
Low Pass Filters (on Spatial domain)¶
Box Filter¶
Box filter는 blurring을 시키는 가장 간단한 low pass filter이며, kernel은 다음과 같음.
where
- 균일한 weight로 구성된 kernel
- kernel 영역에 있는 pixel들의 합을 가지도록 함 (
normalize=False가 기본).
OpenCV에서는 cv2.boxFilter로 제공됨.
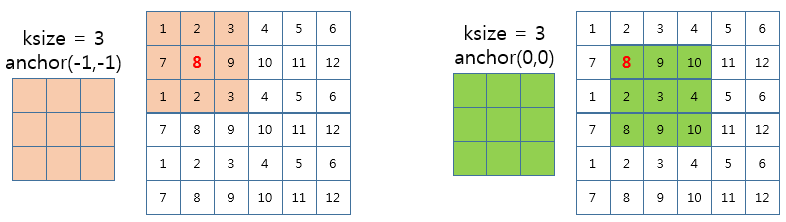
src: input imageddepth: output image depth (-1일 경우 input image와 같음)ksize: kernel sizeanchor: 결과값이 저장될 위치, default: (-1,-1) = center of kernel.normalize: flag, 정규화 여부borderType: padding 방식
다음 그림은 anchor의 위치를 나타냄.
OpenCV에서는 cv2.blur라는 함수도 제공하는데 이는 normalized box filter라고 할 수 있음.
Median Filter¶
- kernel 범위의 pixel intensity 들의 median으로 output image 의 대상 pixel intensity를 바꿈.
- salt and pepper noise or impulse noise 제거에 탁월함.
- 가장 쉬운 비선형 필터.
- Low-Pass Filter에 비하여 edge를 보호하면서 smoothing하는 효과
- sharpness의 큰 차이를 보이지 않으면서 noise 제거 가능
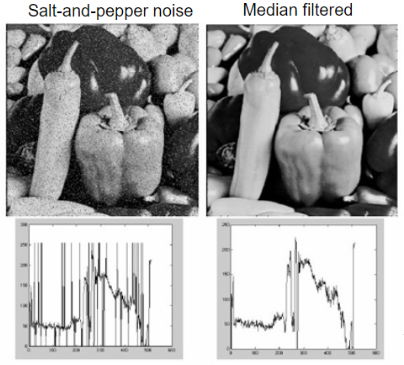
다음 그림은 salt and pepper noise에서 얼마나 median filter가 효과적인지를 보임.
Example¶
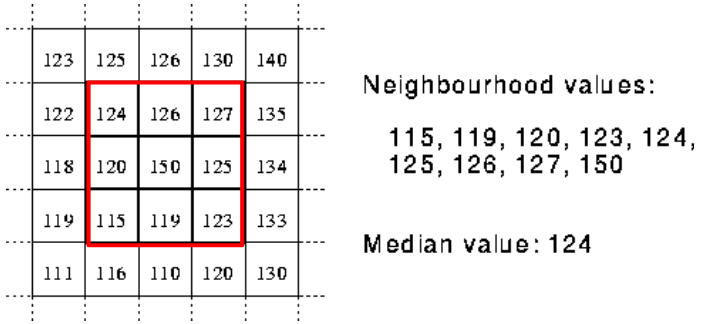
8-neighborhood에 자신을 포함하고, intensity값에 따라 sorting한 후 median에 해당하는 intensity를 결과 영상의 anchor pixel에 설정.
OpenCV에서는 cv2.medianBlur로 제공됨.
Gaussian Filter¶
kernel이 다음의 2D Gaussian distribution을 따름.
- 새로운 pixel의 값을 결정할 때, 원래 해당 위치의 값에 가장 큰 영향을 받고, 나머지 주변 pixel에서는 가까울수록 많은 영향을 받게 됨.
- standard deviation이 클수록 blurring이 심해짐.
OpenCV에서는 cv2.GaussianBlur로 제공됨.
ksize: odd number-
sigmaX: 0 일 경우 자동 생성됨.\(\sigma_\text{x}=0.3( 0.5(\text{ksize}_\text{x}-1) -1) +0.8\)
-
sigmaY: default는sigmaX임. borderType: padding 방식.
Helper function으로 Gaussian Kernel을 계산해주는 cv2.GaussianKernel을 제공함.
- ret : 1차원 가우시안 커널이므로
ret*ret.T(outer product)를 통해 2차원으로 만들어 사용하는게 일반적.
Bilateral Filter¶
- 픽셀 간의 거리 뿐 아니라 두 픽셀의 intensity의 차이도 고려한 가중치의 Kernel을 사용.
- 기존의 blurring filter들과 달리, edge preservation이 우수함.
and normalization term, \(W_p\), is defined as
where
- \(f_\text{filtered}\) is the filtered image;
- \(f\) is the original input image to be filtered;
- \(\textbf{x}\) are the position vector (or coordinate) of the current pixel to be filtered;
- \(\Omega\) is the window centered in \(\textbf{x}_i\), so \(\textbf{x}_i \in \Omega\) is another pixel;
- \(g_r\) is the range kernel for smoothing differences in intensities (this function can be a Gaussian function);
- \(g_s\) is the spatial (or domain) kernel for smoothing differences in coordinates (this function can be a Gaussian function).
OpenCV에서는 다음과 같은 cv2.bilateralFilter로 제공됨.
src: 입력 이미지, numpy의ndarrayd: 필터의 크기(직경). 5 이상 사용시 매우 느림.sigmaColor: color-space filter의 sigmasigmaSpace: spatial-space filter의 sigma
sigmaColor와sigmaSpace의 range는 10~150 로 사용하고, 둘 다 같은 값으로 지정하는 것을 OpenCV tutorial에 권함.
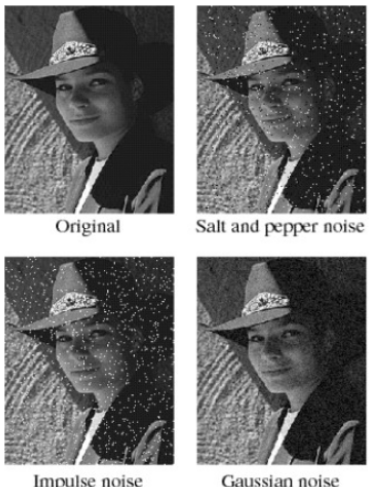
Noises¶
Smoothing filter (or Low pass filter)에서 주로 제거하고자 하는 noise는 다음과 같음.
Salt and Pepper noise- contains random occurrences of black and white pixels
Impulse noise- contains random occurrences of white pixels
Gaussian noise- variations in intensity drawn from a Gaussian normal distribution