Laplacian of Gaussian (LoG) LoG는 Marr과 Hildreth에 의해 1980년에 제안된 기법.
Gaussian blurring을 사용하여 noise를 제거(or 완화)시킨 후 Laplacian을 가하여 edge를 추출. Laplacian이 edge를 잘 찾아내는 장점을 가지나, noise도 같이 증폭시키는 단점을 가지고 있기 때문에, Laplacian의 장점을 극대화하고 단점을 상쇄하기 위해 제안되었음.
Gaussian Blurring Gaussian Blurring의 kernel은 다음 수식을 따름.
std인 \(\sigma_x,\sigma_y\) 가 커질수록 blurring이 심해짐.
일반적으로는 isotropic이라고 가정하여 \(\sigma=\sigma_x=\sigma_y\) 로 처리됨.
\[ G(x,y) = \dfrac{1}{2\pi\sigma_\text{x}\sigma_\text{y}} \exp \left[ -\left( \dfrac{(x-x_o)^2}{2\sigma_\text{x}^2}+\dfrac{(y-y_o)^2}{2\sigma_\text{y}^2}\right)\right] \]
좀 더 단순하게, 앞의 상수 부분을 생략하고 다음으로도 표시하는 경우도 많다.
\[ G(x,y) = \exp \left[ -\left( \dfrac{(x-x_o)^2}{2\sigma_\text{x}^2}+\dfrac{(y-y_o)^2}{2\sigma_\text{y}^2}\right)\right] \]
Laplacian of a Gaussian (LoG) 의료영상을 포함한 영상처리에서 Laplacian은 수평과 수직방향의 2차 미분
\[ \nabla^2 f(x,y)=\frac{\partial^2}{\partial x^2}f(x,y)+\frac{\partial^2}{\partial y^2}f(x,y) \]
Log는
Gaussian filter를 input image \(f\) 에 가해주고(convolution) 이후에 Laplacian을 가해줌. 좀더 수식에서 중요한 부분에 집중하기 위해 \(x_o=y_o=0\) 으로 처리하여 전개하면 다음과 같음.
\[ \begin{aligned}\nabla^2G(x,y)=&\frac{\partial^2}{\partial x^2} G(x,y)+\frac{\partial^2}{\partial y^2} G(x,y)\\ =& \frac{1}{2\pi\sigma_x \sigma_y} \left[ \frac{\partial}{\partial x}\left\{\frac{-x}{\sigma_x^2} \text{exp} \left( -\left( \dfrac{x^2}{2\sigma_\text{x}^2}+\dfrac{y^2}{2\sigma_\text{y}^2}\right)\right)\right\} +\frac{\partial}{\partial y}\left\{\frac{-y}{\sigma_y^2} \text{exp} \left( -\left( \dfrac{x^2}{2\sigma_\text{x}^2}+\dfrac{y^2}{2\sigma_\text{y}^2}\right)\right)\right\}\right] \\=& \frac{1}{2\pi\sigma_x^5\sigma_y}\left[x^2-\sigma_x^2 \right] \text{exp} \left(- \dfrac{x^2}{2\sigma_\text{x}^2}-\dfrac{y^2}{2\sigma_\text{y}^2}\right) \\&+\frac{1}{2\pi\sigma_x\sigma_y^5}\left[y^2-\sigma_y^2 \right] \text{exp} \left(- \dfrac{x^2}{2\sigma_\text{x}^2}-\dfrac{y^2}{2\sigma_\text{y}^2}\right) \\ =& \left[\left(\frac{x^2}{\sigma_x^4} - \frac{1}{\sigma_x^2}\right) + \left(\frac{y^2}{\sigma_y^4} - \frac{1}{\sigma_y^2}\right)\right] \frac{1}{2\pi\sigma_x\sigma_y} \exp\left(-\frac{x^2}{2\sigma_x^2} - \frac{y^2}{2\sigma_y^2}\right) \\ =& \left(\frac{x^2}{\sigma_x^4} + \frac{y^2}{\sigma_y^4} - \frac{1}{\sigma_x^2} - \frac{1}{\sigma_y^2}\right) \frac{1}{2\pi\sigma_x\sigma_y} \exp\left(-\frac{x^2}{2\sigma_x^2} - \frac{y^2}{2\sigma_y^2}\right) \\ =& \left(\frac{x^2}{\sigma_x^4} + \frac{y^2}{\sigma_y^4} - \frac{1}{\sigma_x^2} - \frac{1}{\sigma_y^2}\right) G(x,y,\sigma_x,\sigma_y) \end{aligned} \]
Gaussian blurring처럼 isotropic이라고 가정하면 다음과 같이 좀 더 간단히 정리됨.
\[ \begin{aligned}\nabla^2G(x,y)&= \left(\frac{x^2 +y^2}{\sigma^4} - \frac{2}{\sigma^2} \right)G(x,y,\sigma) \\ &=\left(\frac{x^2 +y^2-2\sigma^2}{\sigma^4} \right)G(x,y,\sigma) \end{aligned} \]
Scale-normalized LoG는 다음과 같이 \(\sigma^2\) 를 곱해준다.
\[ \nabla^2G(x,y)=\left[\frac{x^2+y^2-2\sigma^2}{\sigma^2}\right]G(x,y,\sigma) \]
\(G(x,y,\sigma)\) 에서 \(\frac{x^2+y^2}{\sigma^2}\) 이 exp함수의 입력으로 들어가는데, normalized되는 것도 비슷한 형태 \(\left[\frac{x^2+y^2-2\sigma^2}{\sigma^2}\right]\) 로 맞춰줘서 \(\sigma\) 의 크기로 인한 문제를 해결함.
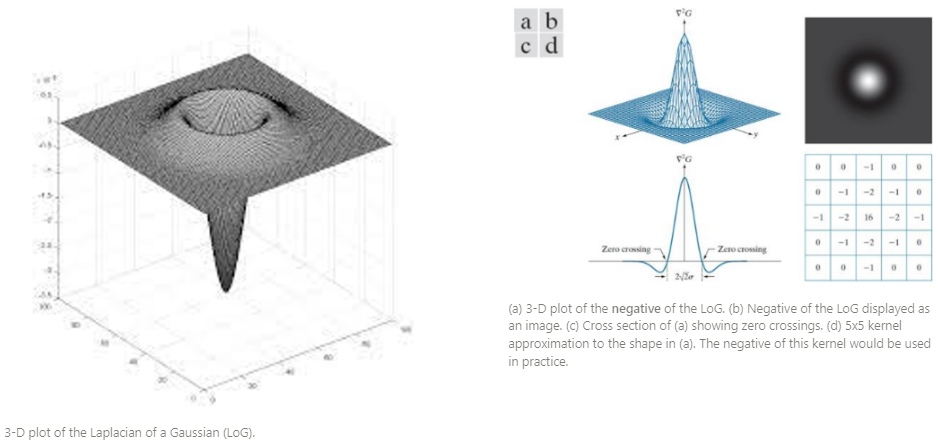
3-D plot and Kernel 아래 그림에서 보이듯이 멕시코 전통 모자를 뒤집어놓은 것처럼 보여서 LoG 연산자는 Mexican hat 연산자 라고도 불림.
여기에 -기호를 씌운 다음의 형태(negative LoG)도 많이 사용됨.
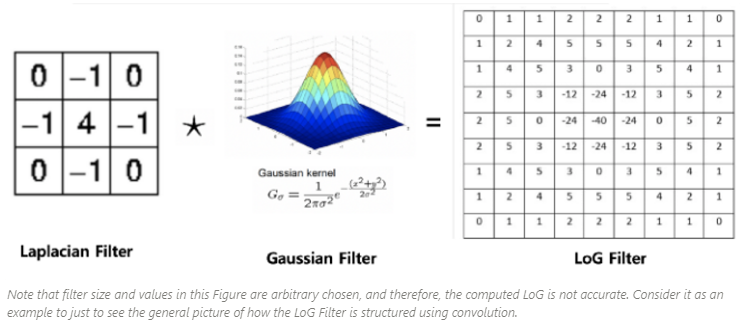
LoG는 frequency domain으로 생각하면,
Laplacian Kernel과 Gaussian Blurring Kernel을 곱한 것 바로 LoG의 Kernel
다음은 \(9\times 9\) LoG kernel을 다음 그림에서 보여준다.
Difference of Gaussian (DoG) 1980년 Marr와 Hildreth에 의해 제안된 LoG의 경우,
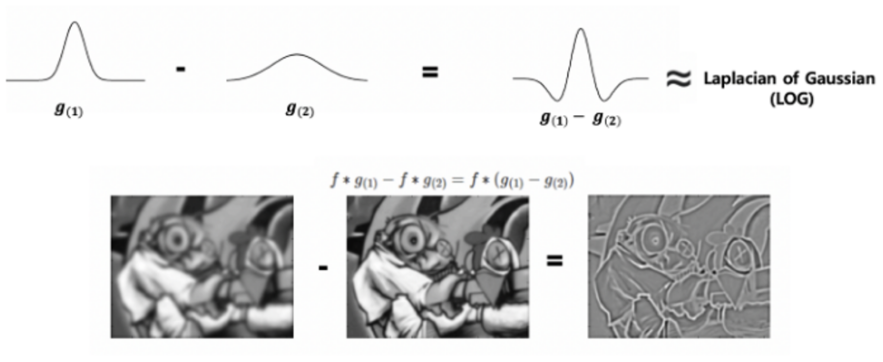
계산량 측면에서 불리한 점들이 있어서 직접 사용되기 보다는 LoG의 approximation들이 보다 많이 사용 가장 대표적인 LoG의 approximation이 바로 Difference of Gaussian DoG)이며 다음 그림이 DoG를 잘 설명해준다.
RWTH Aachen, computer vision group
주의할 점은 Gaussian filter \(g(1), g(2)\) 가 각기 다른 \(\sigma\) 를 가진다는 점임. SIFT등에서도 일반적으로 LoG가 아닌 DoG를 사용한다. 수식으로 DoG가 어떻게 LoG의 approximation이 되는지는 다음 URL을 참고하라.
References