Keypoint Detection¶
skimage.feature¶
keypoint 중 blob을 이용한 방식들 중 대표적인 구현물이 다음 세가지임.
skimage.feature.blob_logskimage.feature.blob_dogskimage.feature.blob_doh
skimage.feature.blob_log- 앞서 keypoint에서 blob을 소개하면서 설명한 Laplacian of Gaussian (LoG)을 이용한 방법을 구현하고 있습니다. 위의 3가지 방법 중 가장 느리고 가장 좋은 성능을 보이는 것으로 알려져 있습니다(개인적으로는 DoG를 선호합니다.). convolution을 사용하기 때문에 size가 큰 blob 검출에서 속도가 매우 느려집니다 (큰 kernel size를 사용하는 터라).
skimage.feature.blob_dog- Difference of Gaussian (DoG)의 구현물입니다. LoG보단 빠르지만, 큰 blob을 검출하는데에는 역시 느려진다는 점은 똑같습니다.
skimage.feature.blob_doh- Determinant of Hessian (DoH)의 구현물이고, 가장 빠르지만 정확도 측면에서의 성능은 제일 안 좋은 것으로 알려져 있습니다. image에서 Hessian의 determinant들의 matrix를 계산하여 blob을 찾아내기 때문에 blob의 크기가 속도에 영향을 주지 않는다는 장점을 가집니다. 문제는 작은 blob들 (skimage문서에 따르면 3pixel보다 작은 경우)을 잘 검출하지 못하는 것으로 알려져 있습니다.
LoG와 DoG 모두 locational inforamtion과 함께, Gaussian에서 사용된 \(\sigma\)를 반환해줍니다. 일반적으로 blob의 radius와 \(\sigma\)간의 관계는 다음과 같습니다. 2D image인 경우 \(r=\sqrt{2}\sigma\), 3D image인 경우 \(r=\sqrt{3}\sigma\)입니다.
References¶
- skimage's Blob Detection
- 다크프로그래머님's Scale space
cv2.SimpleBlobDetector¶
대표적인 Keypoint Detection에 사용되는 class이다.
Blob 은 Binary Large Object 의 줄임말로, 같은 성질을 가지는 픽셀들이 연결되어있는 어느 정도 크기의 region 을 가리킨다.
skimage의 경우, LOG, DOG와 같은 알고리즘 별로 따로 blob detector가 구현된 것과 달리 opencv는 여러 기준들을 한번에 처리하는 형태로 SimpleBlobDetector를 제공한다.
cv2.SimpleBlobDetector.Params을 이용하여 blob으로 분류될 기준을 설정하고, cv2.SimpleBlobDetector에 argument로 넘겨주어 해당 기준의 detector instance를 생성한 다음, detect(gray_img)메서드를 통해 keypoints들의 list를 반환받는 형태로 사용된다.
cv2.SimpleBlobDetector.Params¶
Blob (=keypoint)을 검출하기 위한 parameter들. 특정 keypoint의 주변 pixel들이 blob으로 인정받기 위해서 필요한 조건을 규정함.
크게 다음의 조건을 따지며 해당하는 attribute들은 다음과 같다.
filterByColor:True이면, blob의 중심에서의 intensity와 blob의 intensity를 비교하여 다를 경우, blob에서 제외시킴.blobColor=0: 기본값이며, dark blob을 검출.blobColor=255: light blob을 검출.
- Thresholding : 다음 두 기준을 정하여 intensity가 두 기준에 의한 범위 내에 있을 때, step에 따라 intensity를 구분함.
minThreshold: 이보다 낮은 경우(inclusive)는 같은 intensity로 본다. (구분하지 않음)maxThreshold: 이보다 높은 경우(exclusive)는 같은 intesity로 보고 구분하지 않음.thresholdStep: min부터 max 사이를 이 step씩 증가시면서 intensity를 구분짓는다. 만일maxThreshold=minThreshold+thresholdStep이 되면 blob이 다 사라지게 된다. 다 같은 단계로 보기 때문임.
filterByArea: blob의 크기에 의해서 결정된다. 사실상 keypoint 주변의 몇개의 pixel이 intensity가 비슷한지를 나타내는 것임. 기본으로True이다.minArea: 기본값이25.0임.maxArea: 이를 넘어가면 blob이 아님. 기본값이5000.0
filterByCircularity: blob이 circle형태에 가까운지를 정량화하여 blob으로 결정함. 이상적인 circle은1.0이나 float 연산으로 인한 오차등을 반영하여 max값을1.1정도로 줘야 제대로 동작한다.minCircularity: blob으로 판단할 최소한의 circularity값.0이 ideal한 최소값이며 line에 해당한다. 기본값은.8이다.maxCircularity: blob으로 판단할 최대한의 circularity값. 이상적인 circle의 경우1.0이나 float 연산오차를 반영하여 이보다 좀더 크게 잡아야한다. 기본값은3.4e+38임
filterByInertia: shape가 등방향성이지 아닌지로 blob을 구분한다.minInertiaRatio: 길쭉한 타원일수록0.0에 가까워진다. 이 값보다는 커야 blob이 될 수 있음. 기본값은0.1임.maxInertiaRatio: blob이 이 값보다 작은 intertia ratio를 가져야 blob이 될 수 있다. circle이1.0이나 역시1.1정도로 보다 큰 값을 주어야 한다. 기본값은3.4e+38임
filterByConvexity: concave(오목)인지 convex(볼록)인지로 blob을 구분. \(\frac{\text{area}}{\text{area of convexhull}}\)로 계산된다.minConvexity: U,또는 C 자 와 같은 형태가 convexity가 작음. 기본값은0.95임maxConvexity: circle의 경우1.0인데, circularity와 마찬가지의 이유로1.1정도 잡아주어야 한다. 기본값은3.4e+38임.
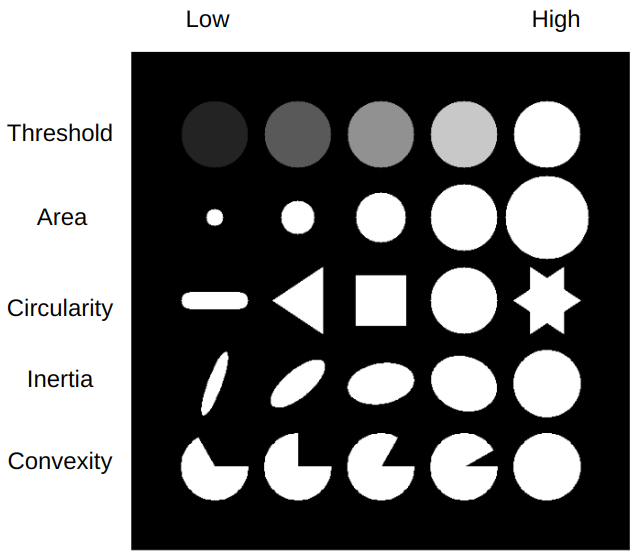
다음 그림은 cv2.SimpleBlobDetector.Params를 정성적으로 이해하기 위해 그려진 그림이다.
다음 코드를 참고하라.
def print_params(params):
print(f'Color [{params.filterByColor}] : {params.blobColor}')
print(f'Threshold(min,max,step): {params.minThreshold}\t,{params.maxThreshold}\t,{params.thresholdStep}')
print(f'Area [{params.filterByArea}] : {params.minArea}\t,{params.maxArea}')
print(f'Circularity[{params.filterByCircularity}] : {params.minCircularity:.3}\t,{params.maxCircularity:.3}')
print(f'Inertia: [{params.filterByInertia}] : {params.minInertiaRatio:.3}\t,{params.maxInertiaRatio:.3}')
print(f'Convexity [{params.filterByConvexity}] : {params.minConvexity:.3}\t,{params.maxConvexity:.3}')
def init_params( default_mode = True, verbose=False):
params = cv2.SimpleBlobDetector_Params()
params.minThreshold = 10 # 25. #default
params.maxThreshold = 225 #220. #default
params.thresholdStep = 5 # 10. #default
params.filterByArea = default_mode #True
# params.minArea = 25.
params.maxArea = 15000.
params.filterByCircularity = default_mode #False
# params.minCircularity = 0.8 # 0.8
# params.maxCircularity = 1.1 # 3.4028234663852886e+38 #default
params.filterByInertia = default_mode # True
# params.minInertiaRatio = .1 # .1 # default
# params.maxInertiaRatio = 1.1 # 3.4028234663852886e+38 #default
params.filterByConvexity = default_mode # True #default
# params.minConvexity = 0.95 # .95 # default #0.86, 0.89, 0.96
params.maxConvexity = 1.1 # 3.4028234663852886e+38 #default
if verbose:
print_params(params)
return params
init_params(False,verbose=True)
cv2.SimpleBlobDetector¶
grayscale image인 img_g로부터 지정된 parameter들을 바탕으로 blob을 검출(= keypoint검출)하는 코드는 다음과 같다.
if int(ver[0]) <3:
detector = cv2.SimpleBlobDetector(params)
else:
detector = cv2.SimpleBlobDetector_create(params)
# detector = cv2.SimpleBlobDetector_create()
key_points = detector.detect(img_g)
- 반환되는
key_points는cv2.Keypoint들의 list이며,cv2.SimpleBlobDetector의 경우, 해당하는 blob의 locational information과 size (지름에 해당함)가 설정되어 있다.
detect에서 수행되는 과정을 간단히 말하면 다음과 같음. 1. source image에 threshold를 적용. - parameter에 넣은 minThreshold 값(포함)과 maxThreshold 값(불포함) 사이를 thresholdStep으로 나누어 각각의 threshold를 사용해서 binary image로 바꾼다. - 기본으로 minThreshold=50, maxThreshold=220, thresholdStep=10 으로 설정이 되어있음. - binary image를 0과 255로 구성되도록 설정하고, minThreshold=253, maxThreshold=255, thresholdStep=1로 설정하면 한번의 threshold 연산만 수행됨. 2. 각각의 binary image에 대해서 cv2.findContours 함수를 적용해서 center를 계산. 3. 각각의 binary image에서 찾은 contour들을 하나로 묶어줌. 이때 minDistBetweenBlobs parameter를 사용됨. 4. 찾아낸 contour를 사용해서 blob의 최종 center와 diameter를 확정. 이를 keypoint로 return한다.
테스트용 gist¶
다음 URL의 ipynb를 통해, 각 파라메터들을 조절이 blob detection에 미치는 영향들을 살펴볼 수 있다.