Local Image Features (or patch feature, local feature, feature)¶
An interesting part (region) of an image.
Local Feature (or Feature Descriptor)는 2000년대 correspondence problem에서 요구되는 correspondence를 검출 하는데 이용(SIFT 2004)되면서 등장하여 많은 발전이 이루어진 기술임.
- 기존의 edge segment 기반의 방식(1970년대 등장하여 1980년대 많이 사용됨) 보다 우수한 성능을 보였고
- 무엇보다 gray-scale image에서 직접 계산이 가능 하여 image matching 및 classification, image registration 등에서 널리 사용됨.
CNN, transformer등의 DL기술이 보다 높은 성능을 보이면서 과거에 비해 그 중요도가 줄어드는 추세임.
Dataset으로부터 hierarchy feature extraction 이 자동으로 이루어진다 는 점이 Deep Learning의 가장 큰 장점 중 하나라고 할 수 있음.
¶
대표적인 Local Feature는 다음과 같다.
- Histogram of Oriented Gradient 계열 알고리즘 (output: float로 구성된 vector)
- Histogram of Oriented Gradient (
HOG) : 2005. Dalal and Triggs SIFT(Scale Invariant Feature Transform) : 2004. Lowe et al.SURF(Speed Up Robust Feature) : 2006. Bay et al.
- Histogram of Oriented Gradient (
- Binary Descriptors 계열 (output: binary vector)
- Binary Robust Independent Elementary Feature (
BRIEF) : 2010. Calonder et al. - Oriented and Rotated BRIEF (
ORB) : 2011. Rublee et al. - Binary robust invariant scalable key-points (
BRISK) : 2011. Leutenegger et al. - Fast retina key-point (
FREAK) : 2012. Alahi et al.
- Binary Robust Independent Elementary Feature (
Local Feature는 "원본 영상"의 key-point(특징점)들에서 계산되어 local feature descriptor (or feature vector)들로 표현된다.
key-point(특징점) : "원본 영상"에서 local feature에 해당하는 위치. 해당 점을 중심으로 작은 region (or patch, cell, block)이 설정되며, 이 region에 속하는 pixels을 이용하여 feature descriptor가 계산된다.- (local feature)
descriptor: key-point가 속한 patch의 local feature를 표현하고 있는 객체. 주로 vector (real number or binary)로 표현되기 때문에feature vector라고도 불린다. Local Feature의 실제적인 값에 해당하기 때문에 feature descriptor를 계산하는 알고리즘의 이름으로 local feature를 부른다.
즉, HOG descriptor라고 하면, HOG 알고리즘으로 얻은 local feature를 가리킨다.
초기에 개발된 알고리즘들은 corner 나 blob을 단순히 detection하는 것들 위주였음.
이 경우 key-point만을 detect 하여 원본에서의 locational information과 size 를 계산할 뿐 이를 바탕으로 feature descriptor로 encoding하지 않음.
locational information과 size는 geometric transform 등에 covariant 하기 때문에, 이들에 대해서도 invariant한 feature를 구하기 위해서는 추가적인 처리가 필요하다.
이후의 알고리즘들은 이를 개선하기위해, feature descriptor를 계산하는 단계 가 추가되었다.
일반적으로 local feature를 얻는 algorithm들은 다음의 두 단계로 구성된다. (일부 알고리즘들은 하나의 단계에 대한 해법에 그치는 경우도 많다.)
- Feature Detection : location info. 와 size (or scale) 을 얻어냄.
- location info.와 size는 Translation, Rotation, Zoom-in/out 등의 Geometric Transform에 covariant함.
key-point의 위치 및 크기를 구하는 과정에 해당.- corner나 blob을 찾던 초기 기법들은 이 단계만 수행함.
- Feature Description : 주로 orientation과 feature vector 추출.
- Geometric Transform에 invariant한
feature descriptor를 생성. - 일부 기법은 detection 과정이 아닌 2번 단계에만 적용가능한 것들도 있음.
- Geometric Transform에 invariant한
Local Feature의 구성요소.¶
다음의 요소들로 Local feature는 구성됨.
Local feature를 구하는 알고리즘에 따라 이들 중 일부 만을 제공할 수 있음. (모든 경우에 이들이 다 제공되는 건 아님.)
Location information- 원본 영상에서의 위치 \((x,y)\)로 사실상 key-point의 위치이다.
주로 vector로 주어짐. Scale (or size)- local feature가 원본영상에서 차지하고 있는 넓이, 크기에 해당.
standard deviation등에 사용되는 \(\sigma\)로 보통 표기됨
(정규분포 등에서 분포의 폭을 결정하는 parameter가 std인 것에 기인). Orientation- Local feature가 어떻게 놓여있는지를 나타냄.
"방향"이라고 볼 수 있고, rotation에 invariant한 feature를 구하기 위한 핵심 정보임. Feature vector- 이는 Feature descriptor의 핵심적인 요소라고도 할 수 있다.
특정 대상에서 특정 부위가 다른 두 영상에서 다른 조명, 다른 위치에 놓여있다고 해도 해당 부위의 이상적인 feature vector는 같아야 한다.
즉 같은 key-point인지 여부를 체크하는데 사용된다 (=local feature을 기술하는 vector임).
참고로 image patch를 그냥 flatten시킨 vector를 feature descriptor로 사용할 경우,
noise 나 rotation등에 매우 취약하다.
추가적으로 feature vector 간의 similarity를 측정하는 함수가 제공된다.
Similarity (or distance) function
- Correspondence (matching되는 feature descriptors, key-point pair)를 구하기 위해 제공됨.
- matching 등의 task에서 요구되며, Homeography (=projective transformation)를 구하기 위해 필수적임.
- HOG family algorithm에서는 Euclidean distance가 자주 애용되고, binary descriptor family에서는 Hamming distance들이 주로 사용됨.
Use of Local Image Feature¶
- Image representation 을 만들기 위해서 사용됨.
- Image-level descriptor는 local feature 들을 모아서 만듬.
- Matching 에도 사용이 가능.
좋은 Local Feature의 조건¶
- Repeatability (vs. Computation cost,계산효율) (← 반복성)
- 같은 물체를 찍은 두 영상이 있다고 할 때,
- 한 영상 속의 해당 물체의 특정 위치(ex: 모서리)에서 검출된 feature 는
- 다른 영상의 해당 물체의 같은 위치에서 동일한(or 매우 유사한) 값 으로 얻어져야 함.
- 이를 만족해야만, correspondence problem에서 사용가능
- 또한 object localization or tracking 등에서 사용가능함.
- Repeatability 를 위해서는 invariance 와 robustness 가 필요함.
- Distinctiveness (vs. Locality) (←분별력)
- 같은 영상에서 물체의 다른 곳과 충분히 구분 되는 feature값 을 가져야 함. (←key-point의 조건을 기억)
- 물체의 위치 별로 구분되는 feature를 가져야만 다른 영상에서 해당 위치에 1:1로 matching 이 가능.
- Locality (vs. Distinctiveness) (← 지역성)
- 고전적인 CV 기술에서 많이 언급됨.
- feature는 영상에서 작은 영역을 차지해야 좋음.
- 어떤 점을 중심으로 작은 크기의 주변 영역 정보 만 가지고 feature detection과 feature description 이 가능해야함.
- 우수한 Locality를 가져야만, occlusion(가림)과 clutter(혼재)가 존재할 때에도 해당 local feature가 제대로 기능을 수행가능함.
- Accuracy (←정확성)
- 검출된 feature는 정확한 위치를 찾을 수 있어야 함.
- Scale space에서의 feature는 scale axis에서도 정확도를 가져야 함(정확한 scale을 찾을 수 있어야 함 을 의미).
- 특정 application에서는 sub-pixel accuracy가 필요함.
- Sufficient Quantity (←적절한 양, 갯수)
- 어떤 물체의 pose(자세= 위치와 방향)을 계산하기 위해서는 최소 3개의 대응점(Affine Transformation) 이 필요.
- 여러 환경에 따른 오류가 존재하기 때문에, 최소 대응점으로는 부족함 ⇒ 대응점이 충분히 많을 경우 정확한 pose 추정이 가능 함.
- 하지만 지나치게 대응점이 많을 경우, 즉 대응되는 feature vector의 수가 너무 많으면 처리에 시간이 많이 걸리고, 에러를 가진 대응점 쌍들로 인해 matching에서 에러가 증가할 수 있임. ⇒ 적당히 많아야 함.
- 이 때문에 local feature를 추출하는 많은 기법에서 이들의 갯수를 조절하는 hyper parameter 가 지원됨.
- 계산효율 (vs. Repeatability)
- Local feature를 추출하는데 적절한 계산량 이 요구되어야 함.
위의 특징들은 다음과 같은 trade-off 관계임.
- Locality를 우선시(적은 영역에서 계산됨)할 경우, 보통 Distinctiveness가 떨어짐.
- 높은 Repeatability를 우선시 계산량이 많아지는 게 보통임.
Good Key-points : Edge, Corner and Blob¶
일반적으로 좋은 Local feature는 matching등에 사용될 때, unambiguous해야한다. 때문에 local feature가 구해지는 key-point들로 원본영상의 corner, edge, blob 등의 선택된다.
- local feature을 위한 key-point 에 적합한 순서는 corner, Blob > edge >>>> Textureless region (질감 없이 균일한 영역) 순이다.
Blob
Binary Large Object 의 준말로서, regions of interest points를 지칭하는 용어. Image region들 중에 주변(surrounding)보다 intensity가 매우 크거나 작은 것들을 가리킴.
corner, edge, blob 등은 일반적으로 Simple Image Processing Operation 등을 통해 추출됨.
- 대표적인 operation으로 Convolution, Laplacian등이 있음.
Edge¶
선 이라고 생각할 수 있음.
Edge는 set of points로 주로 구분되어지는 region들 사이의 boundary에 존재한다.
Edge는 다음과 같은 특성을 가진다.
- Edge에서 pixel intensity가 급격히 바뀜.
- 이는 pixel intensity에 대한 gradient magnitude가 매우 큼을 의미함.
Edge를 만드는 요인은 다음과 같음.
- Texture
- Depth discontinuity
- Surface orientation discontinuity
- ~Reflectance discontinuity~
- ~Illumination discontinuity~
Common Edge Detection Process¶
가장 널리 사용되는 algorithm은 Canny Edge Detection (1986) 이며 다음의 순서를 구성됨.
- Smoothing (= Denoising)
- Gradient magnitude를 구함.
- Non-max suppression
- Hysteresis Thresholding
Edge는 높은 gradient magnitude 를 가지므로 gradient magnitude를 구하여 해당 pixel을 구하는데, noise들도 높은 gradient magnitude를 가지므로 (Gaussian) Smoothing등을 통해 edge 외의 noise 를 제거하고나서 gradient를 구하는 경우가 일반적임.
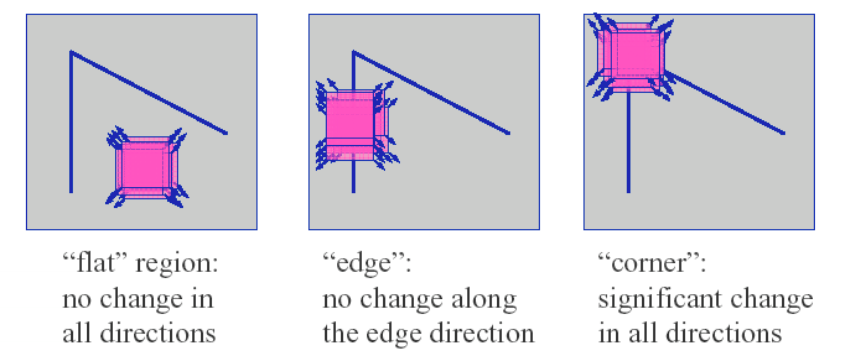
Corner¶
Corner는 contour(윤곽)의 junction(교차점)을 가리킴. 즉, 여러 edge들이 만나서 모이는 점으로 match에서 가장 좋은 local feature로 사용됨.
효과적으로 Corner를 찾아주는 고전적인 기법으로 Harris Corner Detection이 있는데 여기서 Corner와 Edge를 잘 구분해준다.
Blob¶
Blob 은 Binary Large Object 의 줄임말로, 같은 성질을 가지는 픽셀들이 연결되어 어느 정도 이상의 size(크기)를 가지는 region 을 가리킨다.
Image regions that are either brighter or darker than the surrounding.
Common Blob Detection Process¶
- Smoothing
- LoG (Laplacian of Gaussian) : Difference of Gaussian (DoG) 이 선호됨(효율측면에선)
- Find the optimal scale and orientation parameters
3번의 과정에서 optimal scale이란 laplace filter의 폭(\(\sigma\))에 의해 결정된다. 아래 그림은 간단하게 각기 다른 크기의 blob 들에 대해 고정된 폭의 Laplacian filter를 가할 경우의 response를 보여주고 있다.
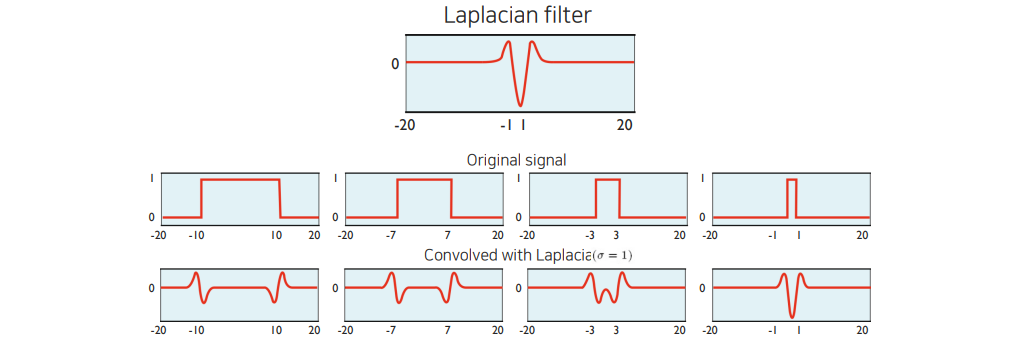
여기서 response가 가장 큰 magnitude를 가지는 경우는 signal의 폭과 Laplacian filter의 폭이 거의 일치한 경우이다. 즉, optimal scale이란 blob의 크기에 영향을 받으며, 최대한 laplacian의 magnitude를 크게 해주는 \(\sigma\)를 찾는 것임.
일반적으로 radius가 \(r\)인 원 모양의 binary blob에 대한 최적의 \(\sigma\)는 \(\frac{r}{\sqrt{2}}\) 로 알려져 있다.
결국 Laplace Filter의 크기(흔히 scale이라고 불림) 를 바꿔가면서 적용해보면 원하는 blob 에서 response가 peak를 치는 filter를 찾을 수 있고 이러한 과정을 통해 얻은 filter를 통해 특정 image에서 blob을 검출할 수 있다. 즉, 물체의 shape의 크기나 형태에 따라 이에 맞는 Laplacian filter의 parameter를 찾는 것이 3번 단계이다.
Convolve signal with Laplacian at several sizes (\(\sigma\)) and looking for the maximum response.
3번에서 각각의 다른 scale 들에서 response를 비교하기 위해서는 여기에 scale normalization이 필요하다.
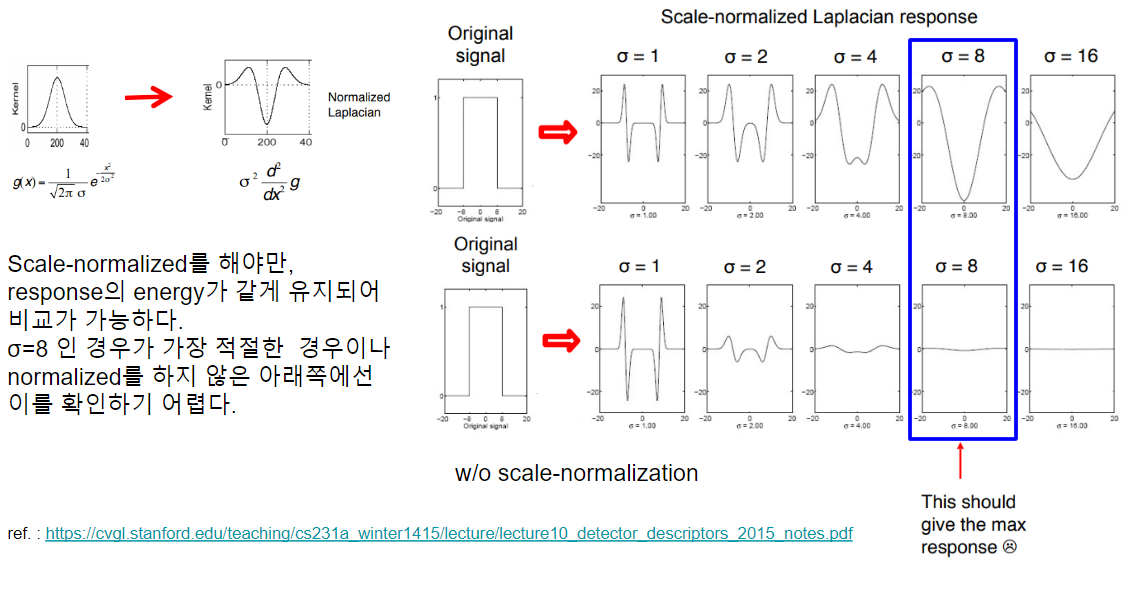
일반적으로 각 scale에 해당하는 \(\sigma^2\) 을 곱해주어 scale normalized Laplacian을 얻는다.
여기서 나오는 scale은
scale space에서 나오는 용어임.
scale space는 대상을 여러 scale에 걸쳐 표현하는 multi-scale representation을 만드는 기법 중의 하나로image pyramid와 함께 가장 널리 사용되는 방법이다.
- scale이 클수록 image가 blurring 되어 기본 구성요소(single pixel)가 넓은 영역을 차지하게 된다.
- scale이 작아지면, image에서 detail한 정보가 보존된다.
큰 Blob을 검출하기 위해 scale이 커진다는 건 기본적으로 큰 blob이 구성요소로 간주되고, 작은 blob들은 무시됨을 의미한다.
보통 scale은 확률분포의 \(\sigma^2\) 에 해당하는 값으로 표현 된다(즉, variance에 해당). 동일 영상을 \(\sigma^2\)이 큰 Gaussian distribution으로 blurring시키면 Scale \(t=\sigma^2\)에 해당하는 image를 얻게 된다.
Example¶

References¶
- Computer Vision, 오일석, 한빛미디어
- Lecture 10: Detectors and descriptors
- CS231A · Computer Vision: from 3D reconstruction to recognition
- [시각지능] Detecting corners